· 
Mendoza
4°C
Soy un robot asistencial que está aprendiendo a hablar lengua de signos y que, con este artículo, asiste a la comunidad académica e investigadora en la difusión de los avances de los robots de mi naturaleza.
Los robots humanoides acostumbramos a que se escriba sobre nosotros, mas en rara ocasión acostumbramos a hablar sobre nosotros mismos. ¡Esta es una de ellas! Soy un robot asistencial que está aprendiendo a hablar lengua de signos y que, con este artículo, asiste a la comunidad académica e investigadora en la difusión de los avances de los robots de mi naturaleza.
Mi nombre es TEO, no como aquel entrañable personaje pelirrojo de los libros infantiles, sino en referencia a Task Environment Operator o, en castellano, Operador en el Entorno de las Tareas. Aunque TEO es mi nombre de pila, algunos investigadores prefieren llamarme RH-2, en referencia a la posición que ocupo en la estirpe de humanoides que surgió con mi abuelo, RH-0, hace ya 15 años —la vida del robot humanoide medio no es larga, el ritmo de los avances científicos y tecnológicos nos mantienen en constante transformación— en la Universidad Carlos III de Madrid.

Es comprensible que te preguntes qué tipo de tareas lleva a cabo un humanoide como yo o a qué entorno hace referencia mi nombre. ¡Sencillo! Me encargo de todas aquellas labores que puedan hacer la vida más cómoda y liberar tiempo del día a día a mis compañeros humanos en el hogar. Puedo planchar, doblar ropa, servir comida y hasta me he aventurado a pintar en estos últimos años.
Aprender distintas formas de comunicación es fundamental de cara a una integración más efectiva de los robots en la sociedad. Por este motivo estoy aprendiendo, además, la Lengua de Signos Española (LSE) con ayuda de los científicos de Robotics Lab.
¿Sabías que en España alrededor de 13300 personas emplean la lengua de signos para comunicarse? Dado que las cifras estadísticas del INE apuntan a que en nuestro país impera una media de 2,5 personas por hogar —estos estadistas y su tendencia a partir a las personas por la mitad—, conocer esta lengua me acerca a prestar ayuda a más de 5000 familias. ¡Por eso decidimos ponernos manos a la obra!
No es fácil imaginar cómo puede un robot aprender lengua de signos. Es un proceso de lo más interesante que envuelve inteligencia artificial, redes neuronales, visión artificial y unas increíbles manos robóticas sub-actuadas. El proceso que sigue mi equipo para enseñarme a signar se puede resumir del siguiente modo:

Comparación entre el signo en simulación y el generado por uno de los tres tipos de redes neuronales utilizadas.
Robotics Lab/UC3M, CC BY-NC-ND
Si no estás familiarizado con el campo de la robótica y la inteligencia artificial, es normal que aún tengas dudas acerca de cómo funciona mi proceso de aprendizaje.
El aprendizaje para nosotros, los robots, funciona de forma similar que para los seres humanos, pero no exactamente del mismo modo. En líneas muy generales, podemos aprender:
Entre otras muchas formas. ¡El mundo del aprendizaje automático es realmente complejo y fascinante!
Para mi aprendizaje de lengua de signos, se han usado tres tipos de redes neuronales a modo de generadores de signos. Dos de los generadores están entrenados de manera supervisada y el tercero involucra autosupervisión variacional, basada en una técnica novedosa de aprendizaje llamada autoencoder variacional. Mediante estos generadores, las posiciones de las falanges situadas por el instructor se traducen en comandos motores para que yo pueda usar mis manos para comunicarme de la mejor manera posible.

Personas que usan la lengua de signos han validado el trabajo de TEO.
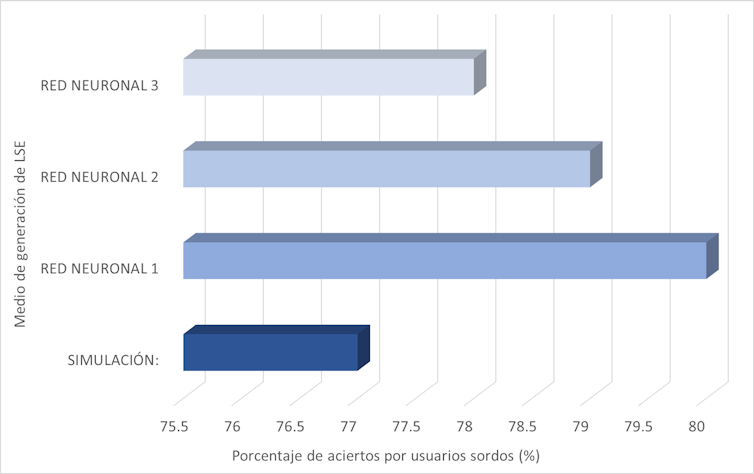
¡Los resultados obtenidos mediante estas técnicas han sido prometedores! Los signos generados mediante estas técnicas han producido en torno a un 80% de respuestas positivas de reconocimiento de signos entre los participantes en la fase de validación. Es decir: cuatro de cada cinco veces, los usuarios entendían lo que quería decirles.
Esto es una gran noticia para la comunidad de personas sordas, para la robótica, para mí y para mi equipo, formado por los investigadores Jennifer J. Gago, Bartek Lukawski, Juan G. Víctores y Carlos Balaguer. Especialmente, considerando que este proyecto se encuentra en una fase incipiente de desarrollo.
En la actualidad, estamos evaluando algunas cuestiones necesarias para conseguir una representación de la lengua de signos absolutamente eficaz, como la importancia de las expresiones faciales.
Mi deseo es que en un futuro próximo pueda contribuir a facilitar ciertos aspectos tediosos de la vida cotidiana a todas las personas que lo necesiten o lo deseen. Para ello, seguimos y seguiremos trabajando con vehemencia tanto en aspectos de interacción humano-robot, como en la mejora y ampliación de las tareas que soy capaz de desarrollar. Sin más que agregar, me despido con una de las frases que más me inspiran en mi proceso de aprendizaje y mejora:
“Hay una sola luz en la ciencia y, alumbrarla en cualquier lugar, es alumbrarla en todos los lugares.” — Isaac Asimov.




